
Simulation development

SAGE is an AI evaluation/simulation platform that uses Gazebo environment to simulate task-environments where AI systems and algorithms can receive training and be evaluated. SAGE is built in ROS2 framework based on model-view-control (MVC) paradigm. It is a tool built on a new evaluation methodology for AI systems with the purpose of comparing various learners on a wide range of tasks and bridging the gap between the evaluation of narrow and general AI. It can easily construct AI task-environments, decompose them, and adjust the properties of simulated environments and learning agents.
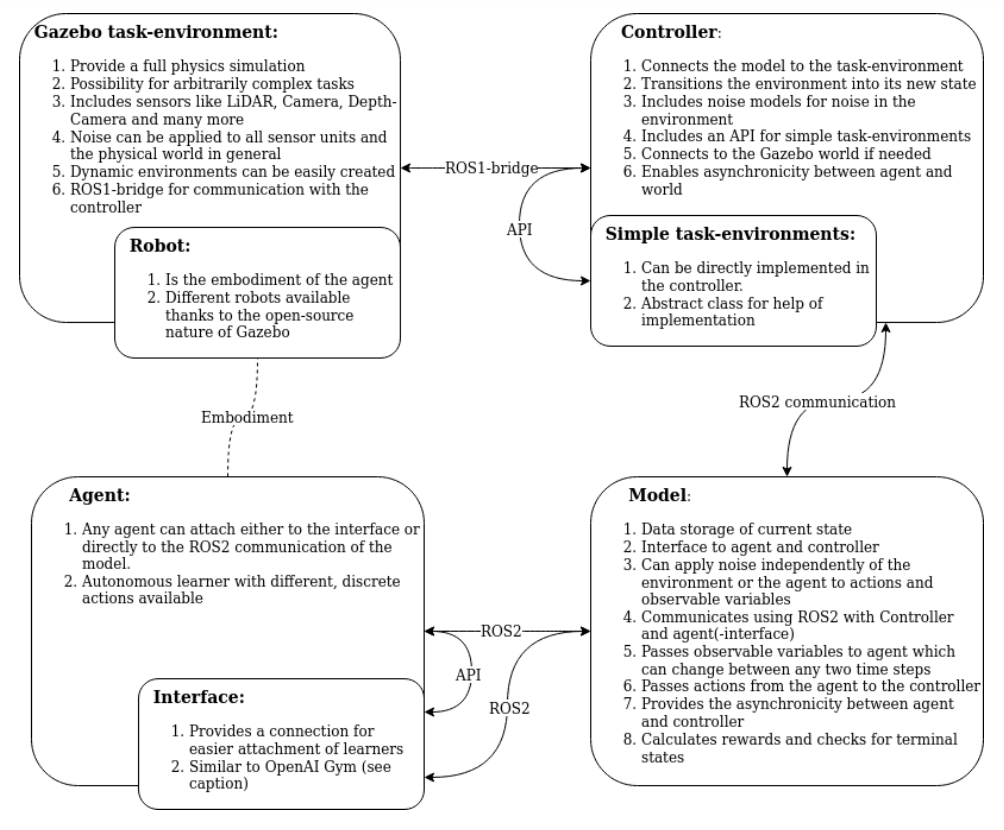
The code base contains C++ programs (on the model and controller nodes) and Python codes on the agent node.
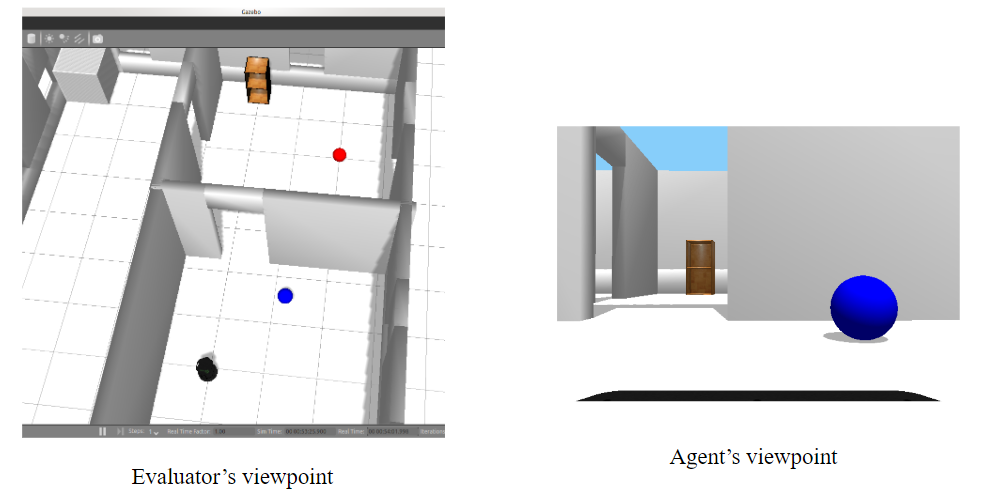
A visual simulation environment, open-source 3D robot simulation software and provides a virtual environment for simulating and testing robots, offering an accurate and realistic representation of dynamical systems and their interactions with the environment
- to visually add/remove different objects and agents to different environments
- to observe how the learning agents behave
- to observe the world (and to act accordingly), using camera sensors
by e.g. depth camera, and RGB cameras
- to have basic awareness e.g. knowing about movement, rotation and touching
by e.g. IMU sensors, contact sensors, and force torque sensors
Here you can read our paper that describes the details of this platform here.